

デジタル技術の活用により高品質な農産物を安定的に栽培するためのスキームを確立し、農業支援および青果卸売業を手がける株式会社Happy Quality(本社:静岡県浜松市、代表取締役:宮地 誠、以下:ハッピークオリティー)は、株式会社フィトメトリクスと共同で開発した「農業版デジタルツインプラットフォーム」(以下、本プラットフォーム)をさらに高度化し、農業用無人走行車 (以下、UGV: Unmanned Ground Vehicle)の開発および本プラットフォームの各農場に合わせてたカスタマイズ提供を開始しました。本プラットフォームを利用することで農場に特化したあらゆる環境の走行データをすばやく取得することが可能になり、UGVなどのロボットの開発速度を向上させつつ、ロバストなシステム開発が可能になります。

▼本プラットフォームのイメージ
<開発背景>
実際の農場では、植物の栄養状態や果実熟度、病害虫など日々の状態把握に多大な労力を要しているという課題があります。その改善として画像診断を利用する方法があり、その際、画像診断用のカメラを自律的に移動させ、農場全体の状態を把握することが理想であり、その移動手段としてUGVが利用可能です。
また、UGVを利用すれば、遠隔地の栽培管理のために、農場へ移動する必要がなく、自宅で遠隔の農場内を観察することも可能になります。
しかし、農場特有の周辺環境の変化 (植物の成長、日々の管理作業、日光、地面など) など様々な農場に適用可能な自律走行UGVの開発は容易ではありません。そこで、本プラットフォームで各農場の周辺環境を網羅的に再現し、デジタルツイン上で走行シミュレーションを行うことで、これらの課題改善および実証検証に取り組みました。
<開発した農業用UGV>
開発したUGVは、小回りの利く車体に走行用センサと植物観察用のカメラを備えており、農場全体の植物状態観察を可能にしています。
▼開発した農業用UGV (本プラットフォーム上)

▼開発した農業用UGV (実物)

<走行シミュレーション>
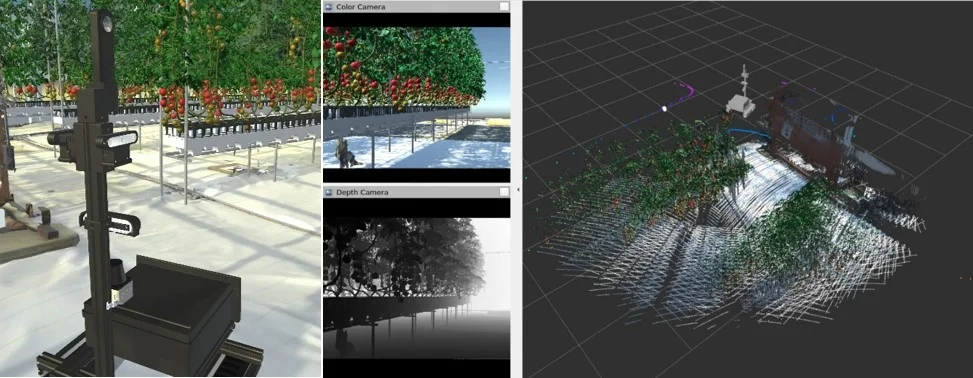
本プラットフォームは、Unity (3Dゲームエンジン) を用いて植物や農業用ハウス、地面など周辺環境を高精度Lidarを活用して完全再現しております。それによりリアルな周辺環境データの生成が可能です。当社では、本プラットフォームとロボット開発用オープンソースミドルウェア (ROS) を連携させ、UGV開発のための走行シミュレーションを実現しています。また、走行シミュレーションの結果を用いて、実際の農業用ハウス内でのUGVの自律走行および画像や動画データの収集を効率よく行い、解析する実証実験も開始しています。
▼走行シミュレーションのイメージ (Unityによる本プラットフォームとROSの連携)
<今後の展望>
「農業版デジタルツインプラットフォーム」のトマト以外へ展開するため、多品目のデジタルツイン農場製作をオーダーメイドで受注し、デジタルツイン農場のライナップ強化および大規模農業への展開を目指します。さらに、悪路などでも走行可能なUGVの開発は、引き続き様々な企業や研究機関と共同で推進してまいります。
また、脱炭素社会や地球温暖化に対応するべく、本プラットフォームを暖房機器や循環扇などの設置場所や最適な制御方法を最適化するための環境シミュレーションの設計にも取り組みを予定しています。今後も、本プラットフォームの広域展開やUGV開発強化に注力するとともに、当社の提唱する“Happy Qualtiy式マーケットイン農業モデル”の更なる拡大を目指し、スマート農業の現場実装の促進に寄与した日本農業の活性化に貢献してまいります。
